












Konsultasi Produk
Alamat email Anda tidak akan dipublikasikan. Bidang yang wajib diisi ditandai *


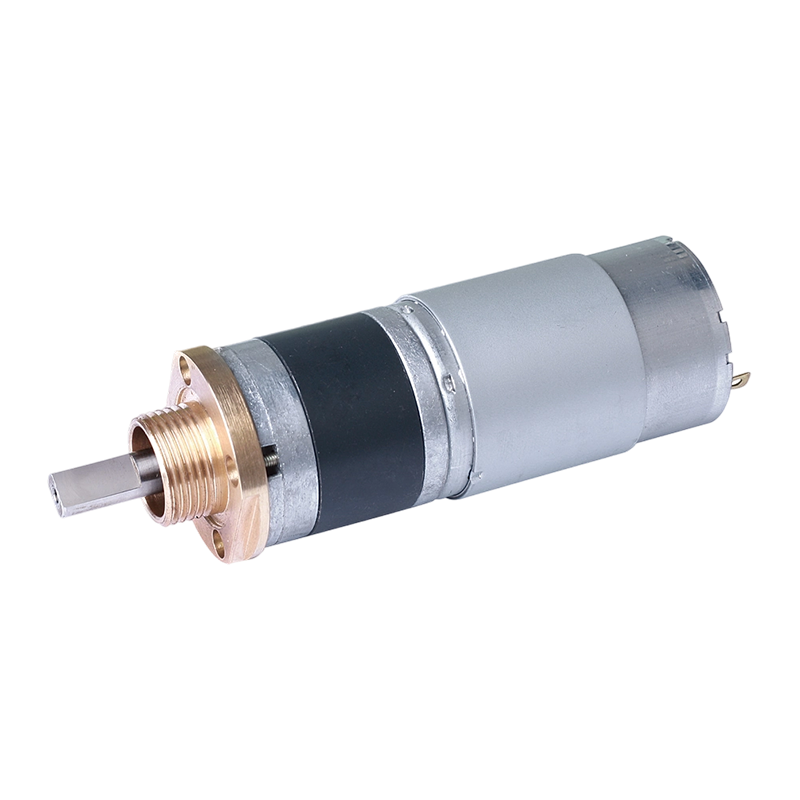
Motor roda gigi DC adalah motor listrik arus searah yang dipasangkan dengan gearbox mekanis dalam satu unit terintegrasi. Motor itu sendiri berputar cepat — seringkali 3.000 hingga 15.000 RPM pada tegangan pengenal — namun sebagian besar aplikasi di dunia nyata memerlukan gerakan yang lambat dan terkontrol dengan gaya putaran yang besar. Gearbox memecahkan masalah ini dengan menukar kecepatan dengan torsi melalui serangkaian roda gigi penyambung. Hasilnya adalah poros keluaran yang berputar jauh lebih lambat dibandingkan rotor motor, namun torsi yang tersedia pada poros secara proporsional lebih tinggi.
Tanpa gearbox, motor DC kecil dapat memutar bilah kipas dengan mudah tetapi kesulitan mengangkat beban, menggerakkan ban berjalan, atau memutar katup. Dengan pengurangan roda gigi, katakanlah, 100:1, motor yang sama yang menghasilkan torsi gerak bebas sebesar 5 mN·m kini menghasilkan keluaran sekitar 500 mN·m — dikurangi kerugian akibat gesekan jaring roda gigi, biasanya 5–20% tergantung pada jenis roda gigi dan pelumasan. Penggandaan torsi tersebut, dikombinasikan dengan integrasi kompak motor dan girboks ke dalam satu rakitan, menjadi alasan mengapa motor berarah DC merupakan salah satu komponen gerak yang paling banyak ditentukan dalam aplikasi industri, komersial, dan konsumen.
Desain gearbox memiliki dampak yang lebih besar terhadap kinerja, ukuran, efisiensi, dan kebisingan dibandingkan hampir semua variabel desain lainnya. Empat konfigurasi mendominasi pasar.
Roda gigi pacu mempunyai gigi lurus yang dipotong sejajar dengan sumbu poros. Mereka adalah jenis roda gigi yang paling sederhana dan paling murah untuk diproduksi, yang menjadikan motor DC roda gigi pacu sebagai pilihan default untuk aplikasi yang sensitif terhadap biaya. Kelemahan utamanya adalah kebisingan: karena seluruh lebar gigi bekerja secara bersamaan pada setiap kontak mesh, roda gigi pacu menghasilkan suara gemerincing yang khas pada kecepatan tinggi. Efisiensinya bagus — biasanya 95–98% per tahap — dan mampu menangani beban radial sedang dengan baik. Motor roda gigi pacu umum digunakan pada printer, mainan, mesin penjual otomatis, dan aktuator tugas ringan di mana pengoperasian senyap bukanlah prioritas.
Gearbox planetary mengatur beberapa roda gigi "planet" di sekitar roda gigi "matahari" pusat, semuanya terdapat di dalam roda gigi ring. Karena beban dibagi ke beberapa roda gigi planet secara bersamaan, motor roda gigi DC planetary menghasilkan kepadatan torsi yang sangat tinggi dalam paket koaksial yang kompak. Poros keluaran sejajar dengan poros motor, sehingga menyederhanakan pemasangan dalam tata letak yang terbatas ruang. Gearbox planetary lebih kaku dan lebih presisi dibandingkan tipe spur atau worm, menjadikannya pilihan utama untuk robotika, kendaraan berpemandu otomatis (AGV), obeng listrik, dan aplikasi apa pun yang menuntut torsi tinggi, akurasi posisi yang ketat, dan masa pakai yang lama. Pengorbanannya adalah biaya: gearbox planetary secara signifikan lebih mahal untuk diproduksi dibandingkan tipe spur atau heliks dengan nilai torsi yang sama.
Gearbox cacing menggunakan poros cacing seperti sekrup yang menyatu dengan roda cacing pada sudut 90 derajat. Konfigurasi ini mencapai rasio reduksi yang sangat tinggi dalam satu tahap — biasanya 5:1 hingga 100:1 — dan memberikan karakteristik penguncian otomatis yang alami: ketika motor berhenti, beban tidak dapat menggerakkan gearbox ke belakang. Hal ini membuat motor DC worm gear ideal untuk aplikasi di mana beban harus menahan posisi tanpa daya, seperti pembuka pintu garasi, lift panggung, aktuator tempat tidur rumah sakit, dan penghalang keamanan. Batasan utamanya adalah efisiensi: gesekan jaring roda gigi cacing tinggi, dengan efisiensi satu tahap tipikal berkisar antara 50–90% tergantung pada sudut sadapan, dengan rasio yang lebih tinggi semakin kurang efisien. Motor roda gigi cacing juga menghasilkan panas yang signifikan pada siklus tugas beban tinggi yang terus menerus.
Roda gigi heliks memiliki gigi yang dipotong pada sudut terhadap sumbu poros, sehingga kontak antar gigi terjadi secara bertahap dan progresif, bukan tiba-tiba. Hal ini secara signifikan mengurangi kebisingan dan getaran dibandingkan dengan roda gigi pacu dan sedikit meningkatkan kapasitas beban karena area kontak efektif yang lebih besar. Motor roda gigi DC heliks umum digunakan dalam aplikasi yang memerlukan pengoperasian lebih senyap — penggerak konveyor, mesin pengemasan, dan peralatan medis. Kombinasi heliks-bevel memungkinkan poros keluaran diimbangi 90 derajat terhadap motor, mirip dengan penggerak cacing tetapi dengan efisiensi lebih tinggi (biasanya 94–97% per tahap). Peningkatan gaya dorong aksial yang dihasilkan oleh jaring roda gigi heliks memerlukan bantalan yang dapat menangani beban ini, sehingga menambah sedikit biaya per unit.
Elemen motor DC sendiri hadir dalam dua arsitektur dasar, dan pilihan di antara keduanya mempengaruhi biaya, persyaratan perawatan, rentang kecepatan, dan masa pakai secara signifikan.
| Fitur | Motor Roda Gigi DC yang Disikat | Motor Roda Gigi DC Tanpa Sikat (BLDC) |
| Metode Pergantian | Mekanik (komutator sikat karbon) | Elektronik (ESC atau driver motor) |
| Kehidupan Pelayanan Khas | 500–3.000 jam (keausan sikat terbatas) | 10.000–20.000 jam |
| Kompleksitas Kontrol | Sederhana — tegangan atau PWM langsung | Memerlukan driver BLDC/ESC khusus |
| Efisiensi | 75–85% tipikal | 85–95% tipikal |
| Kebisingan & EMI | Lebih tinggi (busur kuas menghasilkan EMI) | Lebih rendah |
| Biaya Satuan | Lebih rendah | Lebih tinggi (pengemudi motor) |
| Aplikasi Khas | Mainan, peralatan, otomatisasi cahaya | Robotika, AGV, peralatan medis, EV |
Untuk pembuatan prototipe atau aplikasi intermiten tugas rendah, motor roda gigi DC yang disikat yang digerakkan oleh jembatan H L298N atau TB6612FNG sederhana adalah rute tercepat dan termurah menuju sistem kerja. Untuk apa pun yang berjalan terus-menerus, beroperasi di lingkungan yang keras, atau harus bertahan bertahun-tahun di lapangan tanpa perawatan, motor roda gigi DC tanpa sikat — meskipun biaya di muka lebih tinggi dan perangkat elektronik driver tambahan — hampir selalu menghasilkan total biaya kepemilikan yang lebih baik.
Lembar data motor roda gigi DC mungkin padat, tetapi lima parameter menentukan apakah motor akan berfungsi dalam aplikasi Anda. Memahami masing-masing mencegah kesalahan pemilihan yang paling umum.
Motor roda gigi DC dirancang untuk tegangan suplai tertentu — paling umum 6V, 12V, 24V, atau 48V dalam aplikasi industri dan hobi. Mengoperasikan motor jauh di atas tegangan pengenalnya akan mempercepat keausan sikat pada jenis sikat, menyebabkan panas berlebih pada belitan, dan memperpendek umur bantalan. Pengoperasian di bawah tegangan pengenal akan mengurangi torsi yang tersedia dan dapat menyebabkan motor terhenti saat diberi beban. Untuk sistem bertenaga baterai, sesuaikan voltase pengenal motor dengan voltase nominal unit baterai pada saat pengisian sedang, bukan pada saat terisi penuh, untuk menghindari voltase berlebih pada puncak siklus pengisian daya. Motor roda gigi 12V DC yang dijalankan dari LiPo 3S yang baru diisi (12,6V) sedikit dapat diterima; menjalankannya dari paket 4S (16.8V) akan menghancurkannya dengan cepat.
Kecepatan tanpa beban adalah RPM poros keluaran ketika motor berjalan pada tegangan pengenal dengan torsi yang diterapkan nol. Pada beban aktual, kecepatan turun — biasanya sebesar 10–20% pada torsi terukur (kontinu), dan hingga 50% pada torsi puncak terhenti. Saat menghitung apakah motor DC dapat menggerakkan beban pada kecepatan yang diperlukan, selalu gunakan kecepatan beban pada titik operasi torsi yang Anda harapkan, bukan angka tanpa beban. Pabrikan terkadang hanya mencantumkan kecepatan tanpa beban dan torsi terhenti; titik operasi yang dibebani berada kira-kira di tengah kurva kecepatan-torsi.
Torsi terukur (juga disebut torsi kontinu) adalah torsi maksimum yang dapat dihasilkan motor tanpa batas waktu tanpa mengalami panas berlebih. Stall torque adalah torsi puncak yang dihasilkan ketika poros ditahan dalam keadaan stasioner — biasanya 5–10 kali torsi terukur untuk motor roda gigi DC yang disikat. Torsi stall berguna untuk mengukur beban puncak yang terputus-putus (misalnya, gaya yang dibutuhkan untuk melepaskan katup yang macet), tetapi pengoperasian terus menerus pada atau di dekat stall akan membuat motor menjadi terlalu panas dengan cepat. Pilih motor yang torsi pengenalnya setidaknya 20–30% di atas torsi beban kontinu yang diharapkan aplikasi Anda. Margin keamanan ini memperhitungkan variasi gesekan, penurunan tegangan, dan penurunan suhu.
Rasio roda gigi menyatakan berapa putaran poros motor yang dihasilkan dalam satu putaran poros keluaran. Rasio 50:1 berarti keluaran berputar satu kali untuk setiap 50 putaran motor. Rasio roda gigi yang lebih tinggi menghasilkan kecepatan keluaran yang lebih rendah dan torsi keluaran yang lebih tinggi. Namun, rasio yang sangat tinggi menyebabkan lebih banyak tahapan roda gigi, yang meningkatkan kerugian gesekan dan serangan balik — jumlah permainan bebas yang kecil pada poros keluaran ketika arah berbalik. Untuk aplikasi pemosisian, reaksi balik (backlash) merupakan spesifikasi penting: kotak roda gigi planetary biasanya menawarkan reaksi balik 0,5–3 menit busur pada tingkat presisi, sementara kotak roda gigi pacu ekonomi mungkin memiliki reaksi balik 1–5 derajat, yang tidak dapat diterima untuk segala hal yang memerlukan pemosisian berulang.
Siklus kerja menggambarkan persentase waktu motor beroperasi versus istirahat dalam periode siklus tertentu. Motor dengan rating S1 (tugas kontinu) dapat bekerja tanpa batas waktu pada beban terukur tanpa terlalu panas. Peringkat S2 (tugas jangka pendek) dan S3 (tugas berkala intermiten) memungkinkan tingkat daya puncak lebih tinggi karena motor mendingin selama periode mati. Selalu sesuaikan nilai tugas motor dengan siklus pengoperasian Anda yang sebenarnya — motor dengan nilai siklus kerja 30% akan menjadi terlalu panas dan rusak jika dijalankan terus-menerus, meskipun torsi dan kecepatan berada dalam batas yang tertera pada label.
Pemilihan voltase sering kali ditentukan oleh sumber daya yang tersedia, bukan preferensi motor, namun memahami kasus penggunaan umum untuk setiap tingkat voltase membantu mempersempit pilihan Anda dengan cepat.
Melakukan pemilihan motor dengan benar pada kali pertama akan menghindari desain ulang yang mahal dan kegagalan di lapangan. Ikuti kerangka praktis ini:
Hitung torsi yang dibutuhkan aplikasi Anda pada poros keluaran. Untuk robot beroda, hal ini berarti menghitung gaya yang dibutuhkan untuk mempercepat massa robot, mengatasi gesekan menggelinding, dan menaiki tanjakan apa pun yang diharapkan dalam pengoperasiannya. Untuk aktuator linier, hitung gaya pada sekrup utama dan ubah menjadi torsi motor melalui timah dan efisiensi sekrup. Tambahkan margin keselamatan 25–50% untuk memperhitungkan variasi gesekan, penuaan, dan skenario pembebanan terburuk. Jumlah torsi target ini — dengan margin yang diterapkan — menjadi spesifikasi torsi terukur minimum Anda.
Tetapkan kecepatan poros keluaran minimum dan maksimum yang dibutuhkan aplikasi Anda. Konveyor yang memindahkan produk dengan kecepatan 0,5 m/s dengan roller penggerak berdiameter 50 mm memerlukan kecepatan keluaran sekitar 191 RPM (0,5 / (π × 0,05) × 60). Pilih motor yang kecepatan tanpa bebannya setidaknya 15–20% di atas kecepatan beban yang diperlukan untuk memastikan motor tidak beroperasi hampir mati dalam kondisi normal.
Gunakan panduan keputusan berikut untuk mencocokkan jenis gearbox dengan persyaratan aplikasi:
Periksa apakah catu daya Anda dapat memenuhi kebutuhan arus puncak motor saat mati. Arus terhenti untuk motor roda gigi DC yang disikat biasanya 5–10 kali arus tanpa beban. Jika suplai Anda tidak dapat memperoleh arus ini secara sementara selama kondisi penyalaan atau kemacetan, tambahkan driver motor pembatas arus dengan batas arus yang dapat disesuaikan, atau pilih driver motor dengan ruang kepala yang memadai. Untuk motor roda gigi DC tanpa sikat, pastikan peringkat arus kontinu dan arus puncak driver BLDC melebihi persyaratan motor dengan margin setidaknya 20%.
Motor roda gigi DC standar tidak disegel. Jika motor akan terkena debu, kelembapan, percikan cairan pendingin, atau kondisi pencucian, tentukan unit dengan peringkat IP — IP54 untuk perlindungan debu dan percikan, IP65 atau IP67 untuk lingkungan yang lebih menuntut. Untuk aplikasi pemrosesan makanan, farmasi, atau kelautan, pastikan bahwa pelumas kotak roda gigi memenuhi persyaratan peraturan yang berlaku (misalnya, gemuk kelas makanan NSF H1 untuk zona kontak makanan). Kisaran suhu pengoperasian juga penting: motor standar diberi nilai ambien 0–40°C; untuk gudang penyimpanan dingin atau instalasi luar ruangan di iklim Utara, konfirmasikan spesifikasi gemuk suhu rendah dan peringkat suhu belitan.
Motor beroda DC muncul dalam berbagai macam produk dan sistem. Memahami di mana mereka biasanya digunakan membantu mengidentifikasi desain referensi yang sesuai dan konfigurasi yang divalidasi.
| Industri | Aplikasi | Tipe Motor Roda Gigi Khas |
| Robotika & AGV | Roda penggerak, penggerak sambungan, mekanisme gripper | Planet tanpa sikat, 24V–48V |
| Otomasi Industri | Konveyor, tabel pengindeksan, aktuator katup | Heliks, cacing, atau planet, 24V |
| Alat Kesehatan | Pompa infus, alat bedah, tempat tidur rumah sakit | Planet tanpa sikat, reaksi balik rendah, 12V–24V |
| Otomotif | Power window, pengatur kursi, penggerak sunroof | Cacing atau taji yang disikat, 12V |
| Elektronik Konsumen | Geser/miringkan kamera, aktuator rumah pintar, printer | Taji yang disikat, 5V – 12V |
| Pertanian | Kontrol katup irigasi, mekanisme penyemaian | Worm atau planetary dengan rating IP, 12V–24V |
| Otomasi Bangunan | Peredam HVAC, aktuator buta, penggerak pintu | Heliks atau cacing tanpa sikat, 24V |
Motor roda gigi DC sangat cocok untuk operasi kecepatan variabel karena kecepatan motor DC berbanding lurus dengan tegangan yang diberikan. Dalam praktiknya, kecepatan dikendalikan dengan salah satu dari tiga metode.
PWM adalah metode standar untuk mengendalikan motor roda gigi DC yang disikat dari mikrokontroler, PLC, dan IC driver motor. Pengemudi menghidupkan dan mematikan suplai motor pada frekuensi tetap — biasanya 1–20 kHz — dan siklus kerja (persentase waktu suplai hidup) menentukan tegangan rata-rata dan kecepatan. Siklus kerja 50% pada 12V menghasilkan sekitar 6V setara dengan motor. Kontrol PWM efisien karena transistor switching menghabiskan sebagian besar waktunya dalam keadaan hidup atau mati sepenuhnya, meminimalkan kerugian resistif. Frekuensi PWM di bawah 1 kHz dapat menyebabkan suara motor merengek saat belitan jangkar bergetar pada frekuensi switching; frekuensi di atas 20 kHz mendorongnya ke atas rentang suara. Untuk motor roda gigi DC yang disikat, frekuensi PWM 10–20 kHz adalah pilihan praktis yang umum.
Untuk aplikasi yang memerlukan kecepatan presisi dan konsisten, apa pun variasi bebannya — platform robotik, tape drive, penyaluran presisi — encoder putar yang dipasang pada poros motor atau keluaran girboks memberikan umpan balik kecepatan real-time ke pengontrol PID. Pengontrol membandingkan kecepatan aktual dengan tekanan yang dikehendaki dan menyesuaikan siklus kerja PWM sebagai kompensasinya. Encoder untuk motor roda gigi DC biasanya merupakan jenis efek hall optik atau magnetik quadrature, dengan resolusi dari 6 hingga beberapa ribu hitungan per putaran tergantung pada persyaratan presisi. Banyak pemasok motor roda gigi DC menawarkan opsi encoder terintegrasi sebagai item katalog standar, sehingga menyederhanakan integrasi perangkat keras secara signifikan.
Dalam sistem sederhana di mana beban relatif konstan dan presisi kecepatan tidak terlalu penting, kecepatan dapat diatur dengan menyesuaikan tegangan suplai dengan catu daya DC variabel atau pengatur tegangan linier. Pendekatan ini adalah yang paling tidak efisien — regulator linier menghilangkan penurunan voltase sebagai panas — dan tidak memberikan kompensasi beban, namun ini adalah implementasi yang paling sederhana dan cocok untuk bangku pengujian, penyesuaian kecepatan manual, dan aplikasi berdaya sangat rendah yang tidak memerlukan pembuangan panas pada regulator.
Memahami apa yang pada akhirnya menyebabkan kegagalan motor roda gigi DC membantu Anda merancang sistem yang memperpanjang interval servis dan mengatasi masalah sebelum menyebabkan waktu henti yang tidak direncanakan.
Alamat email Anda tidak akan dipublikasikan. Bidang yang wajib diisi ditandai *
Hak Cipta © Zhejiang Dongzheng Motor Co, Ltd. Semua Hak Dilindungi Undang-undang.
 Produsen Motor Roda Gigi DC
Produsen Motor Roda Gigi DC